|
Do-Gon Kim I am an incoming PhD student in Robotics @ Georgia Institute of Technology, where I will be researching in the the Inference Lab, advised by Professor Ferdous Alam. I recently received my Master's degree in Mechanical Engineering @ Columbia University, where I researched in the Robotic Manipulation and Mobility (ROAM) Laboratory with Eric Chang as a graduate researcher, advised by Professor Matei Ciocarlie, and in the Nonlinear Controls Research Group as a graduate researcher, advised by Professor Homayoon Beigi. Prior to Columbia, I received my Bachelor's degree in Mechanical Engineering @ New York University, where I worked in the Control/Robotics Research Laboratory (CRRL) as an undergraduate researcher, advised by Professor Farshad Khorrami. Email / CV / Google Scholar / GitHub / LinkedIn |

|
Recent Updates
[1-2026] Our Paper, SpikeATac: A Multimodal Tactile Finger with Taxelized Dynamic Sensing for Dexterous Manipulation, is accepted by ICRA 2026!
[10-2025] Our work on SpikeATac is featured in The Wall Street Journal and IEEE Spectrum!
[10-2025] Presented paper & poster at IROS 2025
[10-2025] Presented poster with ROAMHand3 demo at NERC 2025
[7-2025] Gave a talk to Re'Generation Movement and high school students through the Jeju Special Self-Governing Province Office of Education’s “2025 Global University Exploration for High School Students”
[6-2025] Our Paper, VibeCheck: Using Active Acoustic Tactile Sensing for Contact-Rich Manipulation, is accepted by IROS 2025!
Research
My current research focuses on tactile sensing, robotic manipulation, and control systems, aiming to develop robots that better understand and respond to the physical world.
|
|
SpikeATac: A Multimodal Tactile Finger with Taxelized Dynamic Sensing for Dexterous Manipulation Eric T. Chang*, Peter Ballentine*, Zhanpeng He*, Do-Gon Kim, Kai Jiang, Hua-Hsuan Liang, Joaquin Palacios, William Wang, Pedro Piacenza, Ioannis Kymissis, Matei Ciocarlie *joint first authorship IEEE International Conference on Robotics and Automation (ICRA) 2026 arXiv / Website |
|
VibeCheck: Using Active Acoustic Tactile Sensing for Contact-Rich Manipulation Kaidi Zhang*, Do-Gon Kim*, Eric T. Chang*, Hua-Hsuan Liang, Zhanpeng He, Kathryn Lampo, Philippe Wu, Ioannis Kymissis, Matei Ciocarlie *equal contribution IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2025 arXiv / Website |
Project
Selected projects from course and research.

|
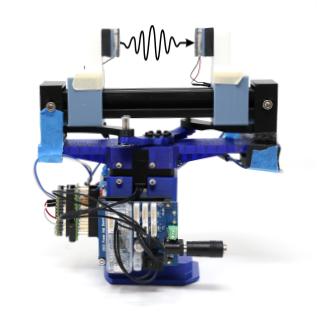
PD Control on JetCobot Research Project | Nonlinear Controls Research Group | Columbia University Built a ROS 2 (C++) control framework for the JetCobot. |

|
Hand Gesture based Parallel Gripper Control Research Project | ROAM Lab | Columbia University Built a vision-based control system for the parallel gripper for hands-free operation. |
|
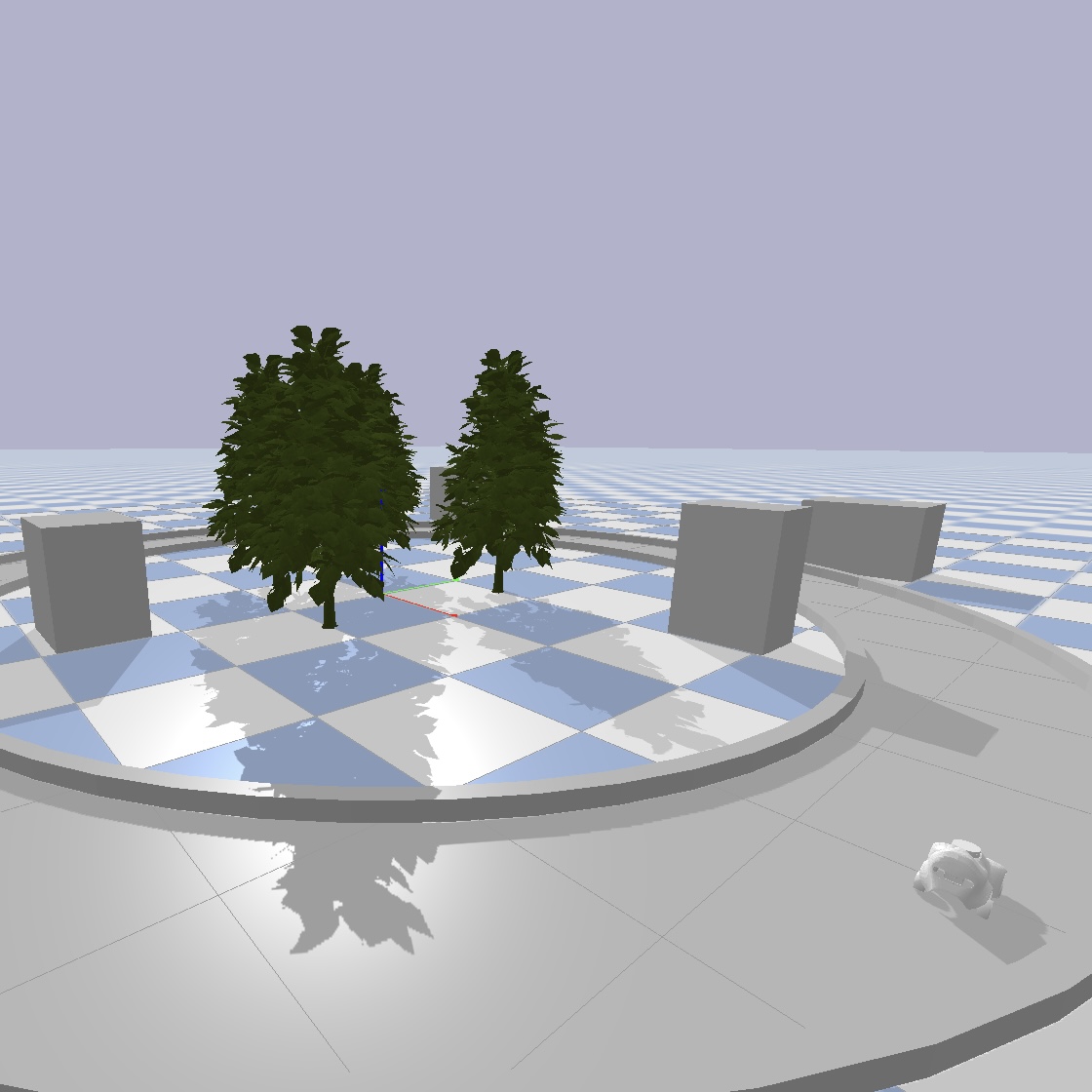
Autonomous Navigation in A Scaled-Down Smart City Research Project | DitecT Lab | Columbia University Designed simulation framework for autonomous vehicles to test algorithms without physical hardware. Developed a real-time ArUco marker detection system for AWS Deepracer. |
|
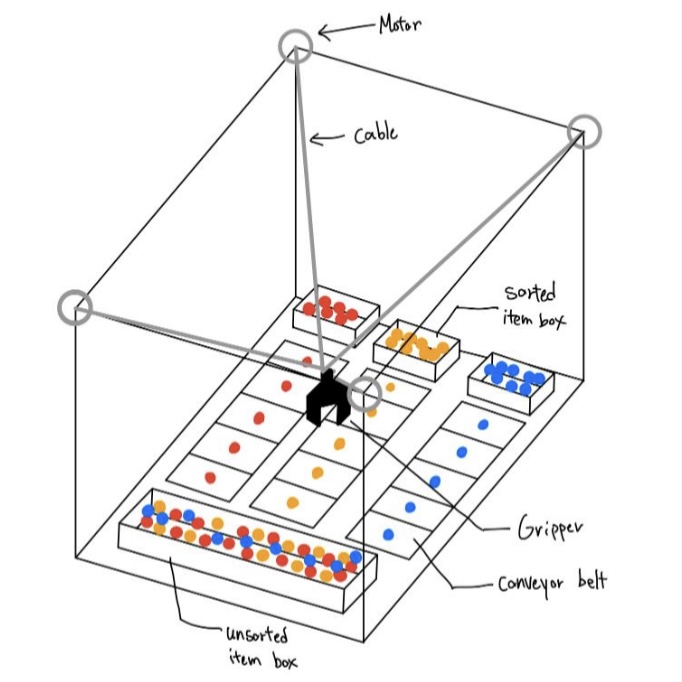
Cable-Driven Parallel Robot with Adaptive Velocity Controller in Distribution Warehouse Course Project | MECE E4602 Introduction to Robotics | Columbia University Developed an adaptive velocity controller for a 4-cable-driven parallel robot, enabling dynamic speed adjustments based on the different objects. paper |

|
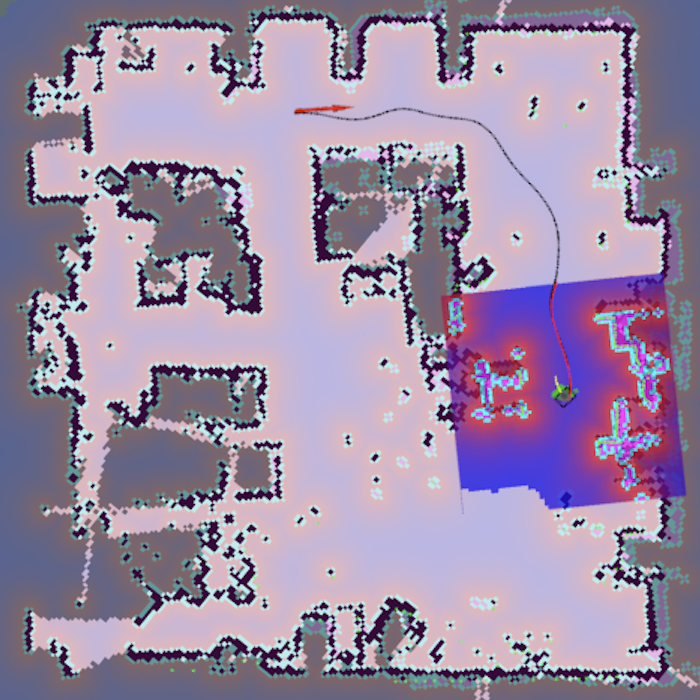
Autonomous Navigation Research Project | CRR Lab | New York University Investigated the accuracy of a map created by gmapping, one of the Simultaneous Localization and Mapping (SLAM) algorithms, using the Turtlebot3 burger. abstract booklet |

|
Sheet Music Sight-Reader Course Project | ROB-UY 3203 Robot Vision | New York University Created a Colab-based CV pipeline that takes in the image of a sheet of music and outputs a playable music file. |
|
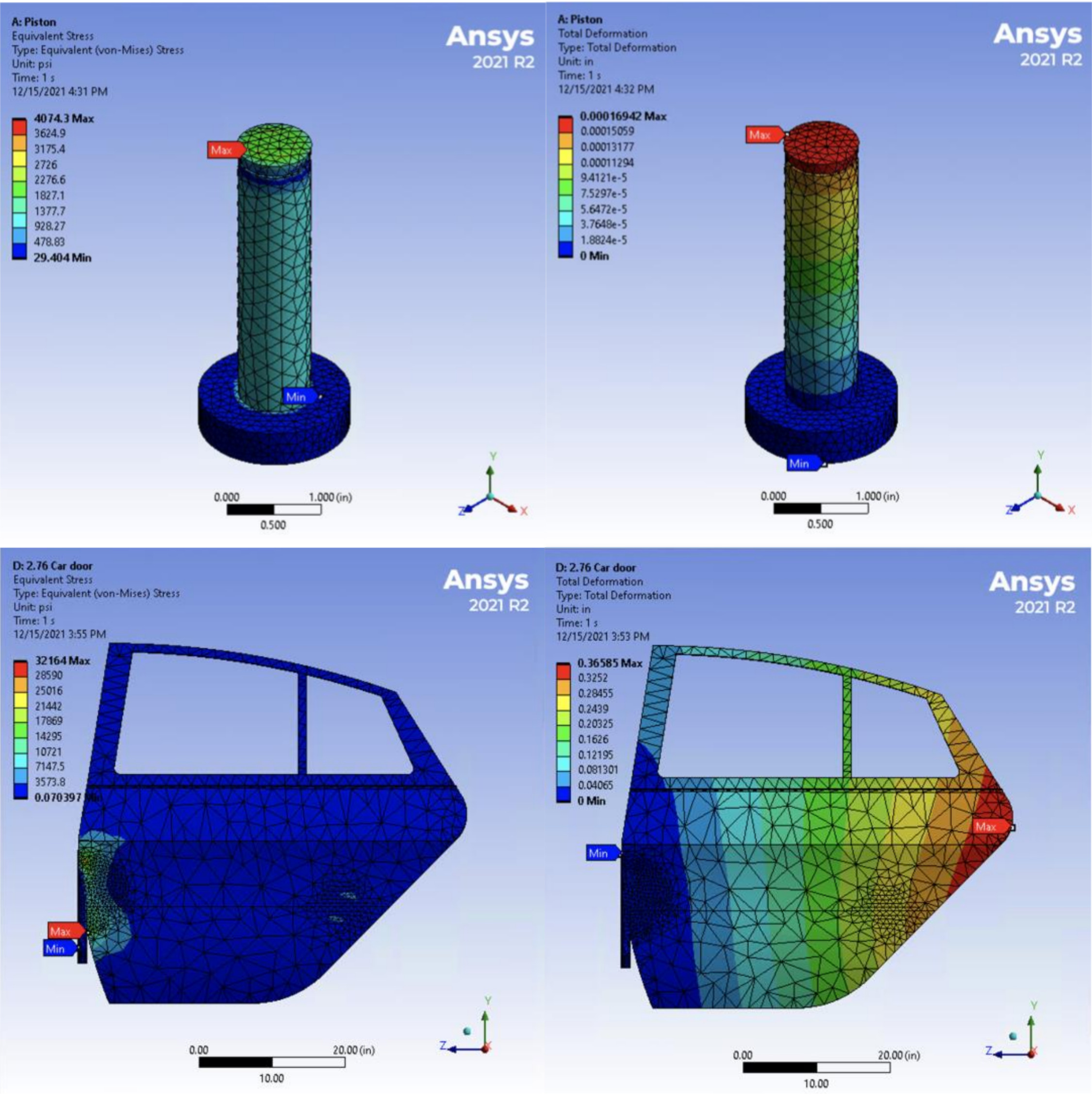
SYDRAULIC Course Project | ME-UY 4112 Senior Design I | New York University Conducted finite element modeling and analysis of a hydraulic jack–assisted car door escape system using ANSYS, evaluating deformation, stress distribution, and harmonic response of piston, cylinder, and door presentation |
Teaching
EEME E4601 Digital Control Systems
Teaching Assistant | Columbia University | Spring 2025
Final Evaluation
MECE E4602 Introduction to Robotics
Teaching Assistant | Columbia University | Fall 2024
EEME E6601 Introduction to Control Theory
Note Taker | Columbia University | Fall 2023
Combied Notes
Website template: Jon Barron