|
Do-Gon Kim I recently completed my Master's degree in Mechanical Engineering @ Columbia University. I researched in the Robotic Manipulation and Mobility (ROAM) Laboratory with Eric Chang as a graduate researcher, advised by Professor Matei Ciocarlie, and in the Nonlinear Controls Research Group as a graduate researcher, advised by Professor Homayoon Beigi. My past research can be categorized into three areas: Finger Design Integrated with Tactile Sensors, Signal Processing for Sensing, and Control Algorithm Development. I have explored the design of systems that mimic the multiple sensory receptors of human touch. Moving forward, I aim to explore the design of tactile fingers and control systems that emulate human touch and realize sensing capabilities beyond the limits of human perception. Furthermore, I seek to investigate how such biologically inspired systems can help robots better understand and interact with their environment. Before Columbia, I received my Bachelor's degree in Mechanical Engineering @ New York University, where I worked in the Control/Robotics Research Laboratory (CRRL) as an undergraduate researcher, advised by Professor Farshad Khorrami. |

|
Recent Updates
[10-2025] Our work on SpikeATac is featured in The Wall Street Journal and IEEE Spectrum!
[10-2025] Presented paper & poster at IROS 2025
[10-2025] Presented poster with ROAMHand3 demo at NERC 2025
[7-2025] Gave a talk to Re'Generation Movement and high school students through the Jeju Special Self-Governing Province Office of Education’s “2025 Global University Exploration for High School Students”
[5-2025] Joined Nonlinear Controls Research Group
[5-2025] Graduated from Columbia University!
Research
My current research focuses on tactile sensing, robotic manipulation, and control systems, aiming to develop robots that better understand and respond to the physical world.
|
|
SpikeATac: A Multimodal Tactile Finger with Taxelized Dynamic Sensing for Dexterous Manipulation Eric T. Chang*, Peter Ballentine*, Zhanpeng He*, Do-Gon Kim, Kai Jiang, Hua-Hsuan Liang, Joaquin Palacios, William Wang, Pedro Piacenza, Ioannis Kymissis, Matei Ciocarlie *joint first authorship Under Review arXiv / Website |
|
VibeCheck: Using Active Acoustic Tactile Sensing for Contact-Rich Manipulation Kaidi Zhang*, Do-Gon Kim*, Eric T. Chang*, Hua-Hsuan Liang, Zhanpeng He, Kathryn Lampo, Philippe Wu, Ioannis Kymissis, Matei Ciocarlie *equal contribution IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2025 arXiv / Website |
Project
Selected projects from course and research.

|
PD Control on JetCobot Research Project | Nonlinear Controls Research Group | Columbia University Built a ROS 2 (C++) control framework for the JetCobot. |

|
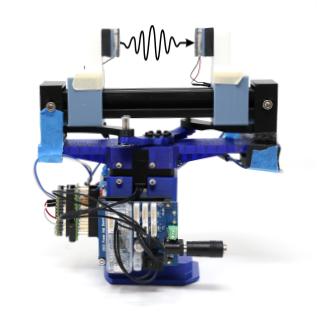
Hand Gesture based Parallel Gripper Control Research Project | ROAM Lab | Columbia University Built a vision-based control system for the parallel gripper for hands-free operation. |
|
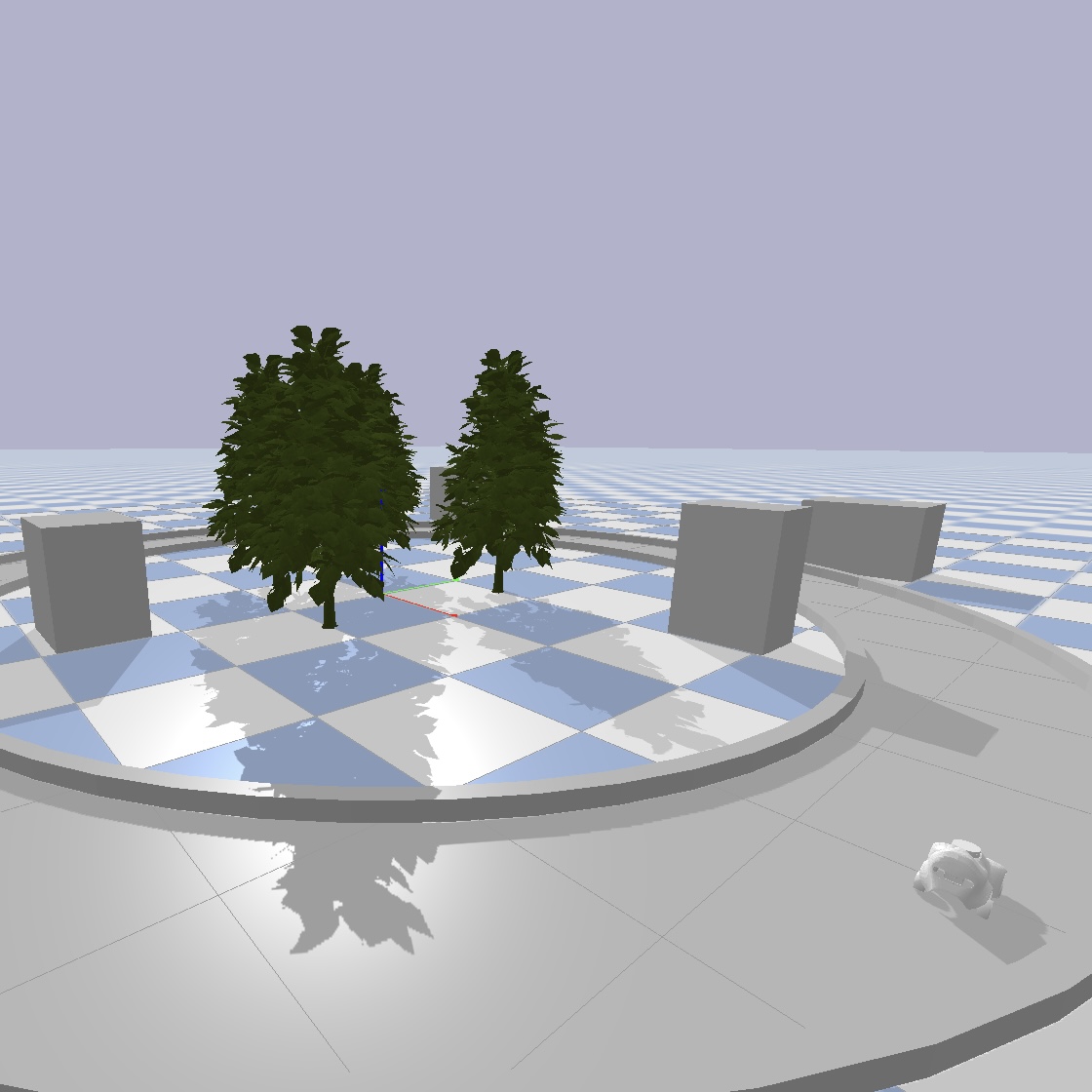
Autonomous Navigation in A Scaled-Down Smart City Research Project | DitecT Lab | Columbia University Designed simulation framework for autonomous vehicles to test algorithms without physical hardware. Developed a real-time ArUco marker detection system for AWS Deepracer. |
|
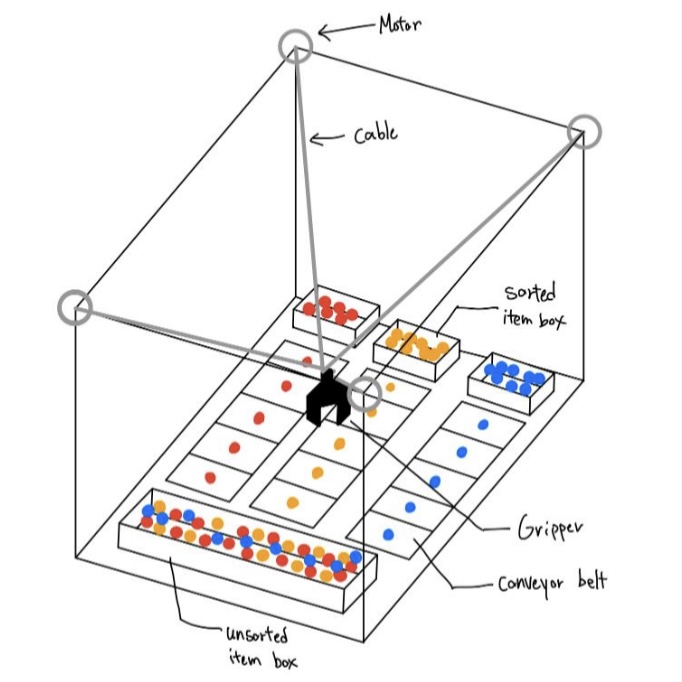
Cable-Driven Parallel Robot with Adaptive Velocity Controller in Distribution Warehouse Course Project | MECE E4602 Introduction to Robotics | Columbia University Developed an adaptive velocity controller for a 4-cable-driven parallel robot, enabling dynamic speed adjustments based on the different objects. paper |

|
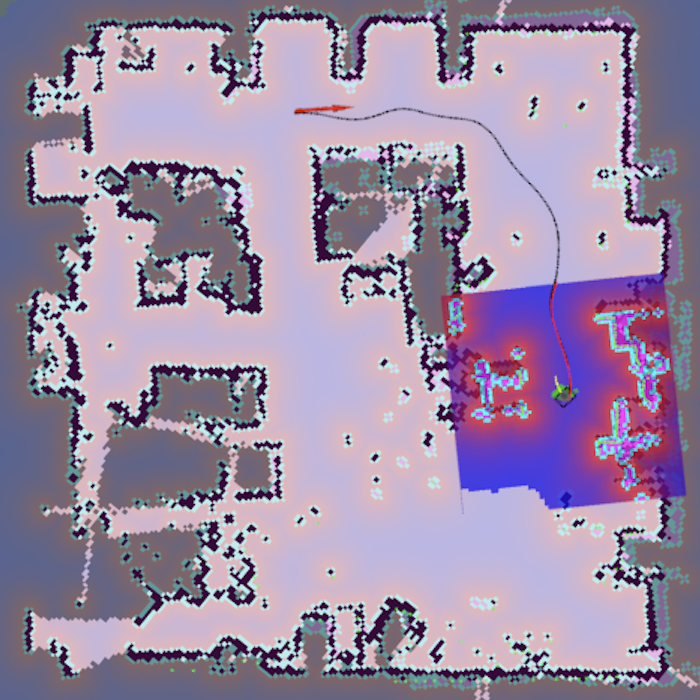
Autonomous Navigation Research Project | CRR Lab | New York University Investigated the accuracy of a map created by gmapping, one of the Simultaneous Localization and Mapping (SLAM) algorithms, using the Turtlebot3 burger. abstract booklet |

|
Sheet Music Sight-Reader Course Project | ROB-UY 3203 Robot Vision | New York University Created a Colab-based CV pipeline that takes in the image of a sheet of music and outputs a playable music file. |
|
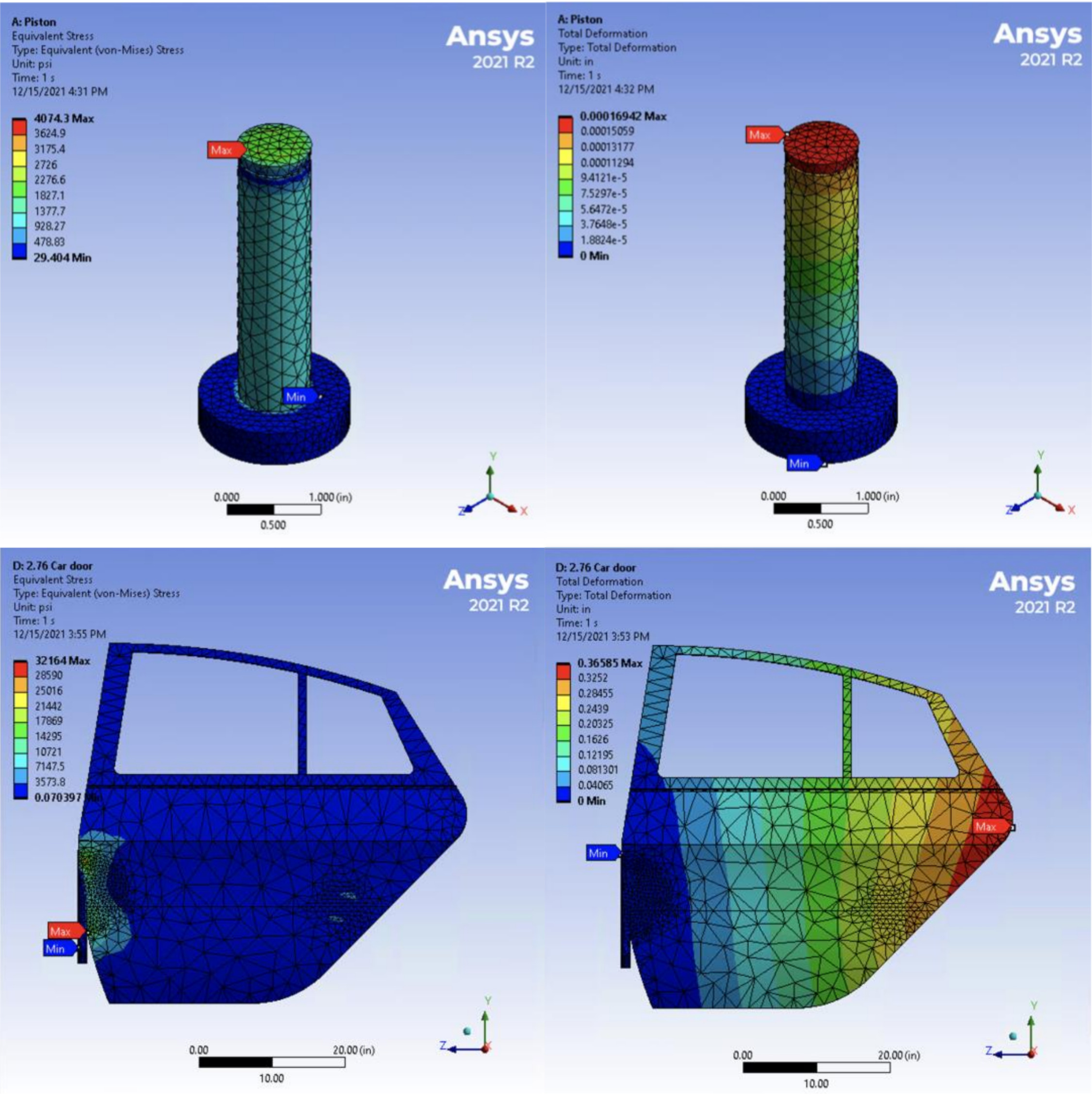
SYDRAULIC Course Project | ME-UY 4112 Senior Design I | New York University Conducted finite element modeling and analysis of a hydraulic jack–assisted car door escape system using ANSYS, evaluating deformation, stress distribution, and harmonic response of piston, cylinder, and door presentation |
Teaching
EEME E4601 Digital Control Systems
Teaching Assistant | Columbia University | Spring 2025
Final Evaluation
MECE E4602 Introduction to Robotics
Teaching Assistant | Columbia University | Fall 2024
EEME E6601 Introduction to Control Theory
Note Taker | Columbia University | Fall 2023
Combied Notes
Website template: Jon Barron